
BIS fnc transformVectorDirAndUp: Difference between revisions
Lou Montana (talk | contribs) m (Text replacement - "\{\{ *Wikipedia *\| *([-a-zA-Z0-9_#':%\/\\]+) *\| *([-a-zA-Z0-9_#':%\/\\ ]+) *\}\}" to "{{Link|https://en.wikipedia.org/wiki/$1|$2}}") |
Lou Montana (talk | contribs) m (Text replacement - "{{Feature|Informative|" to "{{Feature|informative|") |
||
| (One intermediate revision by the same user not shown) | |||
| Line 6: | Line 6: | ||
|gr1= Vectors | |gr1= Vectors | ||
|descr= [[ | |descr= [[File:transformVectorUpAndDir.jpg|300px|right]] | ||
Rotates both [[vectorDir]] and [[vectorUp]] on 3 axes: z (yaw), x (pitch) and y (roll). Positive angle direction is according to the {{Link|https://en.wikipedia.org/wiki/Right-hand_rule|right hand rule}}. | Rotates both [[vectorDir]] and [[vectorUp]] on 3 axes: z (yaw), x (pitch) and y (roll). Positive angle direction is according to the {{Link|https://en.wikipedia.org/wiki/Right-hand_rule|right hand rule}}. | ||
{{Feature| | {{Feature|informative| The vectors are rotated first on '''z''' axis then on '''x''' axis then on '''y''' axis. For example standard [[0,1,0],[0,0,1]] pair rotated 90 degrees on every axis will result in [[0,0,1],[0,-1,0]]}} | ||
|s1= [vectorDirAndUp, yaw, pitch, roll] call [[BIS_fnc_transformVectorDirAndUp]] | |s1= [vectorDirAndUp, yaw, pitch, roll] call [[BIS_fnc_transformVectorDirAndUp]] | ||
Latest revision as of 00:25, 2 February 2024
Description
- Description:
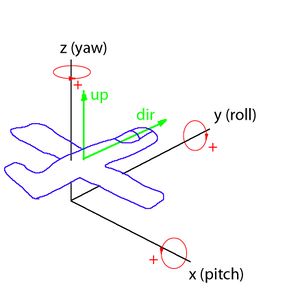
Rotates both vectorDir and vectorUp on 3 axes: z (yaw), x (pitch) and y (roll). Positive angle direction is according to the right hand rule.
- Execution:
- call
- Groups:
- Vectors

Syntax
- Syntax:
- [vectorDirAndUp, yaw, pitch, roll] call BIS_fnc_transformVectorDirAndUp
- Parameters:
- vectorDirAndUp: Array in format [vectorDir, vectorUp] -(Optional, default [[0,1,0],[0,0,1]])
- yaw: Number - (Optional, default 0) yaw angle
- pitch: Number - (Optional, default 0) pitch angle
- roll: Number - (Optional, default 0) roll angle
- Return Value:
- Array in format [vectorDir, vectorUp]
Examples
- Example 1:
- private _vDirUp = [[vectorDirVisual uav, vectorUpVisual uav], 0, 0, 90] call BIS_fnc_transformVectorDirAndUp;
- Example 2:
- Create UAV object and make it pitch with mouse up/down and roll with mouse left/right:
uav = "B_UAV_05_F" createVehicle [0,0,0]; uav attachTo [player, [0,30,10]]; findDisplay 46 displayAddEventHandler ["MouseMoving", { uav setVectorDirAndUp ( [ [vectorDirVisual uav, vectorUpVisual uav], getDirVisual uav, _this select 2, _this select 1 ] call BIS_fnc_transformVectorDirAndUp ); }];
Additional Information
- See also:
- vectorDir vectorUp setVectorDirAndUp
Notes
-
Report bugs on the Feedback Tracker and/or discuss them on the Arma Discord.
Only post proven facts here! Add Note